| Title | Enhancing Lidar-GPS Fusion for Localization: Integrating Ionospheric Modeling with NeQuick G and V2V Implementation |
| Publication Type | Conference Proceedings |
| Year of Conference | 2025 |
| Authors | Zayed, G, Saeed, A, Ismail, Y |
| Conference Name | HamSCI Workshop 2025 |
| Date Published | 03/2025 |
| Publisher | HamSCI |
| Conference Location | Newark, NJ |
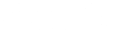
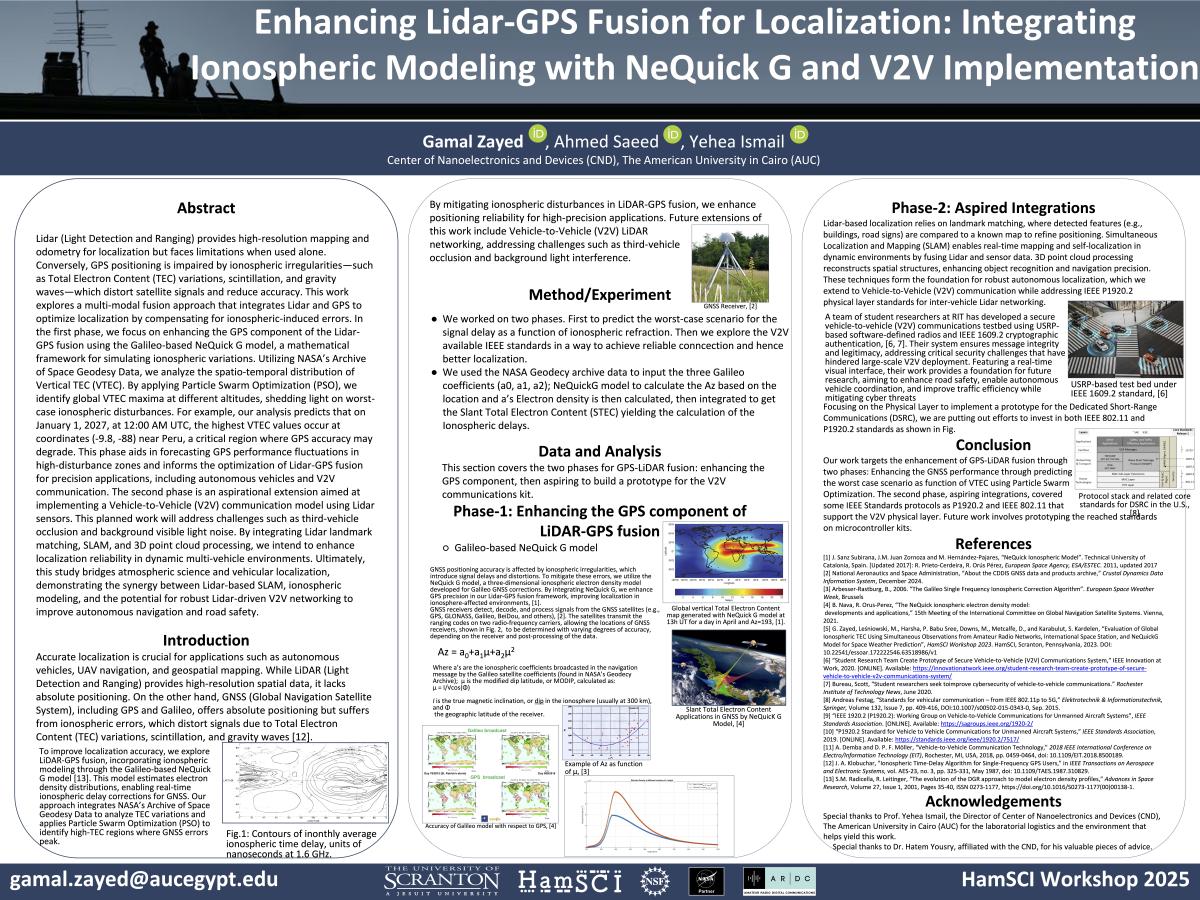
| Abstract | Lidar (Light Detection and Ranging) provides high-resolution mapping and odometry for localization but faces limitations when used alone. Conversely, GPS positioning is impaired by ionospheric irregularities—such as Total Electron Content (TEC) variations, scintillation, and gravity waves—which distort satellite signals and reduce accuracy. This work explores a multi-modal fusion approach that integrates Lidar and GPS to optimize localization by compensating for ionospheric-induced errors. In the first phase, we focus on enhancing the GPS component of the Lidar-GPS fusion using the Galileo-based NeQuick G model, a mathematical framework for simulating ionospheric variations. Utilizing NASA’s Archive of Space Geodesy Data, we analyze the spatio-temporal distribution of Vertical TEC (VTEC). By applying Particle Swarm Optimization (PSO), we identify global VTEC maxima at different altitudes, shedding light on worst-case ionospheric disturbances. For example, our analysis predicts that on January 1, 2027, at 12:00 AM UTC, the highest VTEC values occur at coordinates (-9.8, -88) near Peru, a critical region where GPS accuracy may degrade. This phase aids in forecasting GPS performance fluctuations in high-disturbance zones and informs the optimization of Lidar-GPS fusion for precision applications, including autonomous vehicles and V2V communication. The second phase is an aspirational extension aimed at implementing a Vehicle-to-Vehicle (V2V) communication model using Lidar sensors. This planned work will address challenges such as third-vehicle occlusion and background visible light noise. By integrating Lidar landmark matching, SLAM, and 3D point cloud processing, we intend to enhance localization reliability in dynamic multi-vehicle environments. Ultimately, this study bridges atmospheric science and vehicular localization, demonstrating the synergy between Lidar-based SLAM, ionospheric modeling, and the potential for robust Lidar-driven V2V networking to improve autonomous navigation and road safety. |
| Refereed Designation | Non-Refereed |
| Full Text |
|